|
OGS
|
|
OGS
|
This ODE solver library has been designed with an implicit first-order quasilinear ODE in mind. However, it is in principle not restricted to such a kind of equation, but can be extended to also solve other equation types. In particular it is possible to introduce equation types that are no ODEs, but are nonlinear equations without time derivative terms.
The aim of the library's design is being able to formulate FEM processes without having to care which time discretization scheme and which nonlinear iteration method will be used to solve it.
The library currently offers the backward Euler time discretization schemes, cf. the conceputal remarks on them. The design follows Gear's method, which also underlies the DASSL algorithm of Petzold et al., cf. Differential-algebraic equations article, section [Numerical methods/Direct discretization] (https://web.archive.org/web/20240423230323/http://www.scholarpedia.org/article/Differential-algebraic_equations#Numerical_methods.2FDirect_discretization) [8].
A rough overview over the interplay between the various parts of this library is given in the image below. Therein red symbols indicate which classes own which matrices or vectors (for the meaning of the different symbols refer to the documentation of the respective classes). The word own should not be taken too strict in the sense of C++ member ownership, although currently it is implemented as such; but in the future this implementation detail might change. Rather own means that the class is in charge of the respective matrix or vector, i.e., it can read from and write to it or pass it on to functions; or in other words: The class knows about the meaning of that matrix/vector. Note that only matrices and vectors that describe some proper state of the respective classes are shown; those storing only intermediate computations have been omitted from the image.
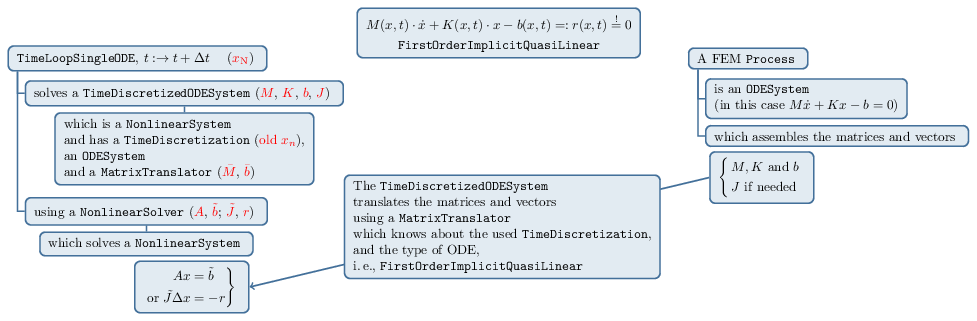
solver library at the example of a first-order implicit quasilinear ODE."@image latex ode-solver-concept.pdf "Interplay of the different parts of the ODE solver library at the example of a first-order implicit quasilinear ODE." In the ODE solver library the instances of some classes can work together with several instances of other classes throughout there lifetime, whereas they have a strict one-to-one correspondence to objects of some different type. Those relations are given in the following table. <table class="markdownTable"> <tr class="markdownTableHead"> <th class="markdownTableHeadRight"> Class 1
Class 2
Relation
Remarks
1:1
the ODESystem
represents part of the state of the TimeDiscretizedODESystem TimeDiscretizedODESystem | TimeDiscretization | 1:1 | analogous for the TimeDiscretization TimeDiscretizedODESystem | MatrixTranslator | 1:1 | analogous for the MatrixTranslator NonlinearSolver | NonlinearSystem | 1:n | a nonlinear solver can solve various equations, one after the other LinearSolver | NonlinearSolver | 1:n | various NonlinearSolver's can share the same LinearSolver
Enumerations | |
| enum class | NumLib::IterationResult : char { NumLib::IterationResult::SUCCESS , NumLib::IterationResult::FAILURE , NumLib::IterationResult::REPEAT_ITERATION } |
| Status flags telling the NonlinearSolver if an iteration succeeded. More... | |
| enum class | NumLib::NonlinearSolverTag : bool { NumLib::NonlinearSolverTag::Picard , NumLib::NonlinearSolverTag::Newton } |
| Tag used to specify which nonlinear solver will be used. More... | |
| enum class | NumLib::ODESystemTag : char { NumLib::ODESystemTag::FirstOrderImplicitQuasilinear , NumLib::ODESystemTag::NeumannBC } |
| Tag used to specify the type of ODE. More... | |
Functions | |
| template<ODESystemTag ODETag> | |
| std::unique_ptr< MatrixTranslator< ODETag > > | NumLib::createMatrixTranslator (TimeDiscretization const &timeDisc) |
| std::pair< std::unique_ptr< NonlinearSolverBase >, NonlinearSolverTag > | NumLib::createNonlinearSolver (GlobalLinearSolver &linear_solver, BaseLib::ConfigTree const &config) |
|
strong |
Status flags telling the NonlinearSolver if an iteration succeeded.
| Enumerator | |
|---|---|
| SUCCESS | |
| FAILURE | |
| REPEAT_ITERATION | |
Definition at line 21 of file EquationSystem.h.
|
strong |
|
strong |
Tag used to specify the type of ODE.
Definition at line 26 of file Types.h.
| std::unique_ptr< MatrixTranslator< ODETag > > NumLib::createMatrixTranslator | ( | TimeDiscretization const & | timeDisc | ) |
Creates a GlobalMatrix translator suitable to work together with the given time discretization scheme.
Definition at line 137 of file MatrixTranslator.h.
| std::pair< std::unique_ptr< NonlinearSolverBase >, NonlinearSolverTag > NumLib::createNonlinearSolver | ( | GlobalLinearSolver & | linear_solver, |
| BaseLib::ConfigTree const & | config ) |
Creates a new nonlinear solver from the given configuration.
| linear_solver | the linear solver that will be used by the nonlinear solver |
| config | configuration settings |
(nl_slv, tag) where nl_slv is the generated nonlinear solver instance and the tag indicates if it uses the Picard or Newton-Raphson method Definition at line 555 of file NonlinearSolver.cpp.
References BaseLib::ConfigTree::getConfigParameter(), BaseLib::ConfigTree::getConfigParameterOptional(), NumLib::Newton, OGS_FATAL, and NumLib::Picard.
Referenced by ProjectData::parseNonlinearSolvers().